检测到是安卓设备,电脑版软件不适合移动端

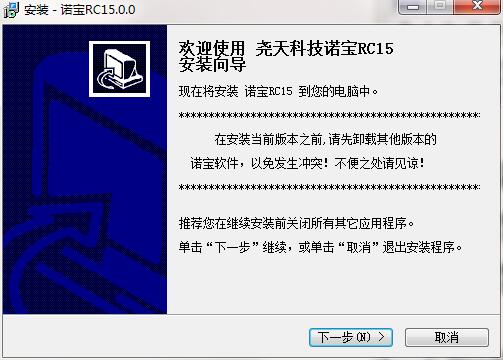
诺宝RC是哈尔滨工业大学(深圳)机器人教育中心开发的机器人编程工具,支持图形化流程图与C语言混合编程。主要面向青少年及机器人初学者,帮助用户通过可视化操作与代码结合的方式,快速掌握智能机器人程序开发。
软件的核心目标是降低机器人编程门槛,通过模块化设计和实时代码转换功能,实现从图形逻辑到专业编程的无缝衔接,适用于教学实践、竞赛项目及基础人工智能学习场景。
1. 提供流程图编辑器:用户可拖拽数字传感器、模拟传感器、运动控制等模块搭建程序框架,系统自动生成对应C语言代码
2. 支持双模式编程:图形化编程界面实时同步生成C语言代码,方便初学者理解底层逻辑;同时支持纯代码模式进行高级算法开发
3. 内置仿真调试环境:模拟机器人实际运行场景,允许在线修改参数、调试逻辑错误,减少物理设备测试次数
4. 模块化程序构建:包含7大类功能模块(流程控制、传感器输入、电机输出等),支持自定义模块添加与方向设置
5. 跨平台程序下载:完成开发后可通过USB线将程序烧录至机器人主控芯片,直接验证程序效果
1. 可视化编程与代码生成联动:相比传统纯代码开发,图形化界面降低学习难度;相较于单一图形化工具,保留完整的C语言控制能力
2. 真实开发流程还原:从需求分析→流程设计→仿真测试→硬件部署的完整开发周期支持,符合工业级开发规范
3. 模块库高度扩展:除预设模块外,支持用户自定义复杂功能模块,满足不同机器人平台的适配需求
4. 教学场景深度优化:界面采用蓝白主色调搭配明快图标,关键功能区布局直观,符合教育用户操作习惯
5. 多语言文档支持:配套完整的中文开发手册与教学案例库,覆盖基础教学到竞赛级项目开发
1. 修复了在Windows 11系统下流程图模块拖拽失效的兼容性问题
2. 新增USB驱动自动检测功能,连接机器人时提示安装必要驱动
3. 优化了C代码生成效率,复杂程序的代码转换速度提升约40%
4. 升级传感器模拟精度,在仿真环境中可设置模拟信号漂移参数
5. 根据用户反馈,新增模块注释功能,支持在流程图中标注模块作用说明

软件信息
程序写入外部存储
读取设备外部存储空间的文件
获取额外的位置信息提供程序命令
访问SD卡文件系统
访问SD卡文件系统
查看WLAN连接
完全的网络访问权限
连接WLAN网络和断开连接
修改系统设置
查看网络连接
我们严格遵守法律法规,遵循以下隐私保护原则,为您提供更加安全、可靠的服务:
1、安全可靠:
2、自主选择:
3、保护通信秘密:
4、合理必要:
5、清晰透明:
6、将隐私保护融入产品设计:
本《隐私政策》主要向您说明:
希望您仔细阅读《隐私政策》
 最新软件
最新软件
 相关合集 更多
相关合集 更多
 相关教程
相关教程
 热搜标签
热搜标签
 网友评论
网友评论
 添加表情
添加表情 
举报反馈

 色情版权反动暴力软件失效其他原因
色情版权反动暴力软件失效其他原因
 官方
官方  纠错
纠错 

































 苹果小圆点安卓版
苹果小圆点安卓版 生存游戏安卓版
生存游戏安卓版 GameMaster(安卓游戏大师)
GameMaster(安卓游戏大师) 人生游戏安卓版
人生游戏安卓版 师父游戏安卓版
师父游戏安卓版 游戏狗安卓游戏盒子
游戏狗安卓游戏盒子 x桌面安卓变苹果
x桌面安卓变苹果 安卓游戏大师
安卓游戏大师
 像素骑士安卓版
像素骑士安卓版 像素军队安卓版
像素军队安卓版 像素小块安卓版
像素小块安卓版 像素赛车安卓版
像素赛车安卓版 像素战士安卓版
像素战士安卓版 像素城市安卓版
像素城市安卓版 像素树安卓版
像素树安卓版 超高速赛车安卓版
超高速赛车安卓版