时间:2025-05-16关注公众号来源:网络
在探索科技与教育的交汇点,斯坦福大学推出了一个革命性的开源平台——“幼儿机器人项目”,它融合了前沿的机器学习算法与先进的人形机器人技术。这个项目不仅是一个技术里程碑,更是跨学科研究的结晶,旨在模仿人类幼儿的学习方式,推动机器人智能的边界。通过开源设计,全球的研究者和爱好者得以共同参与,将这个平台作为探索机器人自主学习、交互以及适应复杂环境的试验田。幼儿机器人项目不仅为学术界提供了宝贵的工具,也向公众展示了未来人机共生的无限可能,开启了人工智能与仿生机器人技术的新篇章。在这个平台上,每一次进步都是向着更加智能化、更加人性化的机器人技术迈进的一步。
斯坦福大学开源的toddlerbot:一款用于运动操作的人形机器人平台
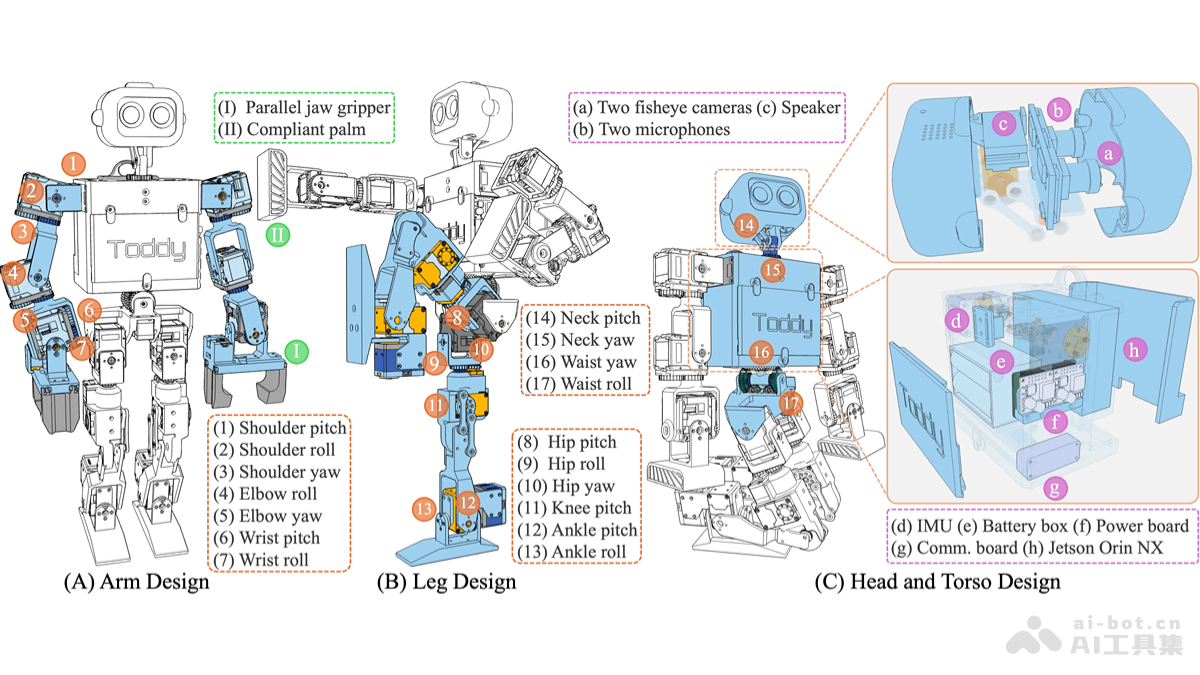
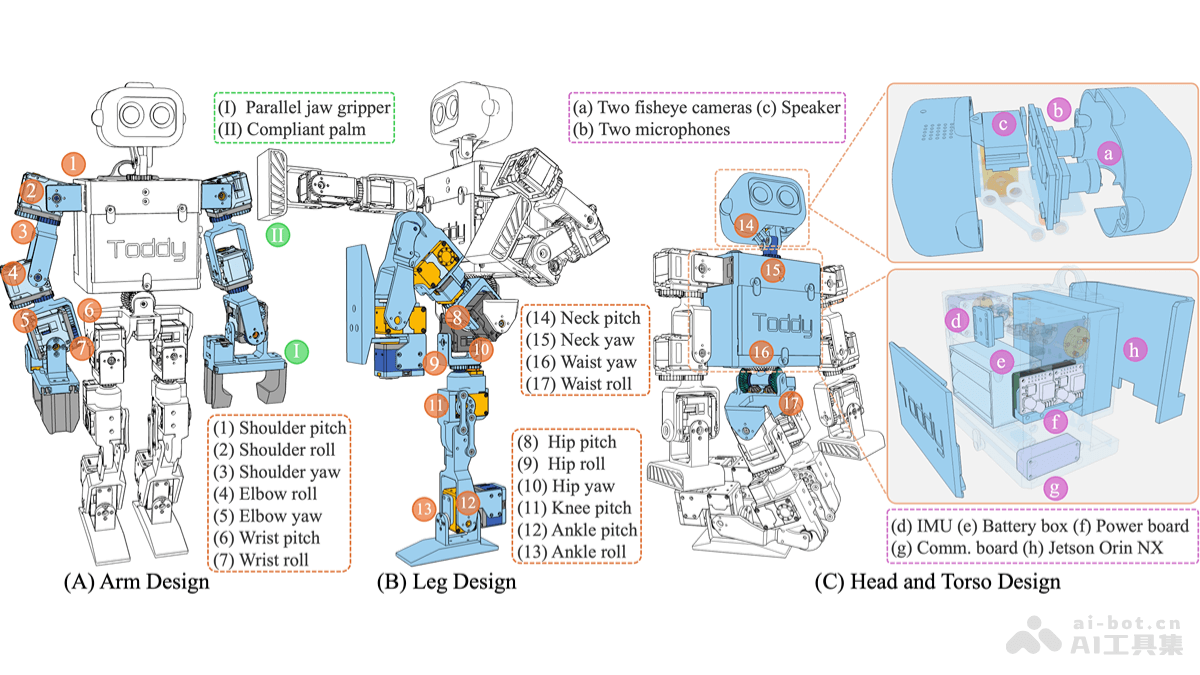
ToddlerBot是斯坦福大学推出的一款开源人形机器人平台,专为高效收集大规模、高质量的运动操作训练数据而设计。它拥有30个主动自由度,采用Dynamixel电机驱动,总成本控制在6000美元以内。凭借数字孪生技术和零点校准,ToddlerBot实现了模拟到现实的零样本迁移,并支持远程操作和高效的现实世界数据采集。在臂展、负载能力、耐力和动态运动等方面,ToddlerBot均展现出优异性能。其开源设计和详细的组装手册方便复制和维护,非常适合科研和教育应用。
 ToddlerBot的核心功能:
ToddlerBot的核心功能:
ToddlerBot的技术原理详解:
数字孪生与零点校准:高保真数字孪生模型基于精确的物理模型和系统辨识技术构建,确保模拟数据与真实世界的一致性;3D打印的校准设备则快速校准机器人零点位置,保证运动控制精度。 电机系统辨识(SysID):通过电机跟踪扫频信号,采集位置跟踪数据并拟合执行模型,确保动态参数的准确性,从而使机器人在模拟和真实环境中保持一致的运动特性。 远程操作技术:以第二个上肢作为远程操作设备,结合力敏电阻和手持游戏电脑(如steamDeck或ROGAllyX),实现对机器人运动的直观控制,方便操作员引导机器人完成复杂任务。 强化学习与模仿学习:采用MuJoCo和PPO算法进行强化学习,训练步行和转向策略,输出关节位置设定值,实现高效的运动控制;模仿学习则基于远程操作采集的真实世界数据,训练扩散策略(DiffusionPolicy),以完成复杂的操作任务。项目资源:
项目官网: GitHub仓库: arXiv技术论文:ToddlerBot的应用前景:
家庭玩具整理:两个机器人协作,一个负责拾取玩具,另一个负责推车,共同完成玩具收纳。 教育编程平台:学生可以通过编程让机器人完成行走、俯卧撑等任务。 实验室运动技能研究:利用强化学习训练机器人完成跳跃、攀爬等高难度动作。 家庭陪伴机器人:与儿童互动,进行拼图或运动游戏。 工业零部件操作:操作小型电子元件或机械零件。以上就是ToddlerBot—斯坦福大学开源的机器学习与人形机器人平台的详细内容,更多请关注其它相关文章!