时间:2025-05-16 关注公众号 来源:网络
北京理工大学的一支精英研究团队近期在自动驾驶技术的关键环节——复杂环境数据集构建上,取得了里程碑式的成就。这一成果标志着我国在智能驾驶技术研发的基础设施建设上迈出了坚实的一步。自动驾驶汽车要安全高效地行驶,离不开对各种复杂道路和天气条件的精准识别与应对,而高质量的数据集正是训练这些智能系统的“基石”。该团队通过创新的数据采集方法和标注技术,模拟并记录了从繁忙都市到偏远乡村,从晴朗白昼到昏暗夜晚等广泛的驾驶场景,极大地丰富了自动驾驶算法的学习资料库。这一突破不仅提升了自动驾驶系统处理复杂情况的能力,也为行业标准的制定提供了重要参考,预示着未来自动驾驶技术将更加安全、适应性更强,向全面商业化应用迈进了一大步。
北京理工大学科研团队发布国际首个复杂环境自动驾驶双4d毫米波雷达数据集dualradar,为自动驾驶感知算法研究提供了宝贵资源。该数据集采集了超过400公里真实道路数据,包含超过10000帧同步标注数据,涵盖了多种复杂场景,例如不同天气(晴天、阴天、雨天)、光照条件(正常光照、逆光)、道路类型(城市道路、隧道)以及时间段(白天、黄昏、夜晚)。

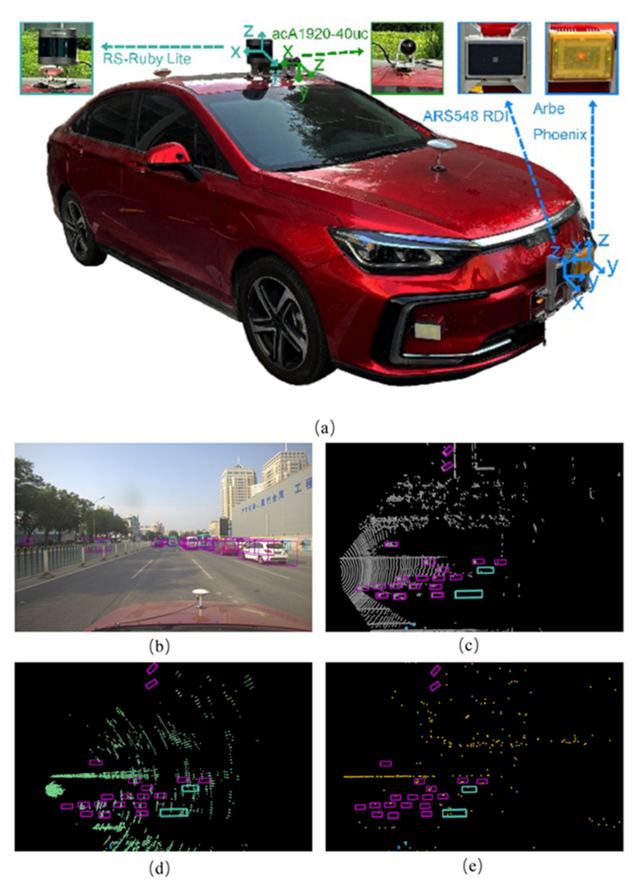
图1:DualRadar数据采集车辆及传感器数据示例
DualRadar数据集的核心在于使用了两种不同类型的4D毫米波雷达:ArbePhoenix和ARS548RDI。ArbePhoenix雷达视野广,点云密度高,但噪声也相对较大;ARS548RDI雷达噪声低,长距离探测精度高,但点云密度较低。这两种雷达的互补特性,使得DualRadar数据集能够更全面地评估自动驾驶感知算法在不同点云密度和噪声水平下的性能。

表1:车载传感器参数

图2:目标类别数量及距离分布

图3:三维目标检测标注示例

图4:不同传感器点云数量统计
该数据集包含汽车、行人、自行车、公交车、卡车等多种目标类别,并提供了详细的三维目标检测和跟踪标注。研究团队相信,DualRadar数据集能够有效推动自动驾驶感知算法在复杂和极端环境下的发展,提升自动驾驶系统的安全性与可靠性,最终促进自动驾驶技术的进步。数据集已公开发布,方便全球研究人员进行算法测试和改进。
以上就是北理工团队在复杂环境自动驾驶数据集建设方面取得重要成果的详细内容,更多请关注其它相关文章!