时间:2025-05-16关注公众号来源:网络
在机器人的世界里,每一步创新都预示着未来科技的新篇章。从传统的扭秧歌到高难度的单脚跳,HugWBC技术犹如一把钥匙,解锁了人形机器人深藏的运动潜能。这不仅是一次技术的跃进,更是机器人与艺术、运动完美融合的展示。HugWBC(假设的先进技术缩写)通过其精密的控制算法和动态平衡技术,让人形机器人不再是僵硬的机械体,而是拥有了令人惊叹的灵活性和协调性。它让机器人在模仿人类复杂舞蹈动作的同时,也探索了机器运动能力的边界。这标志着我们在探索智能机器人领域又迈进了一大步,预示着未来机器人不仅能高效工作,还能以更加生动、灵活的方式融入我们的文化生活之中,开启一个机器人运动与艺术表现的新纪元。
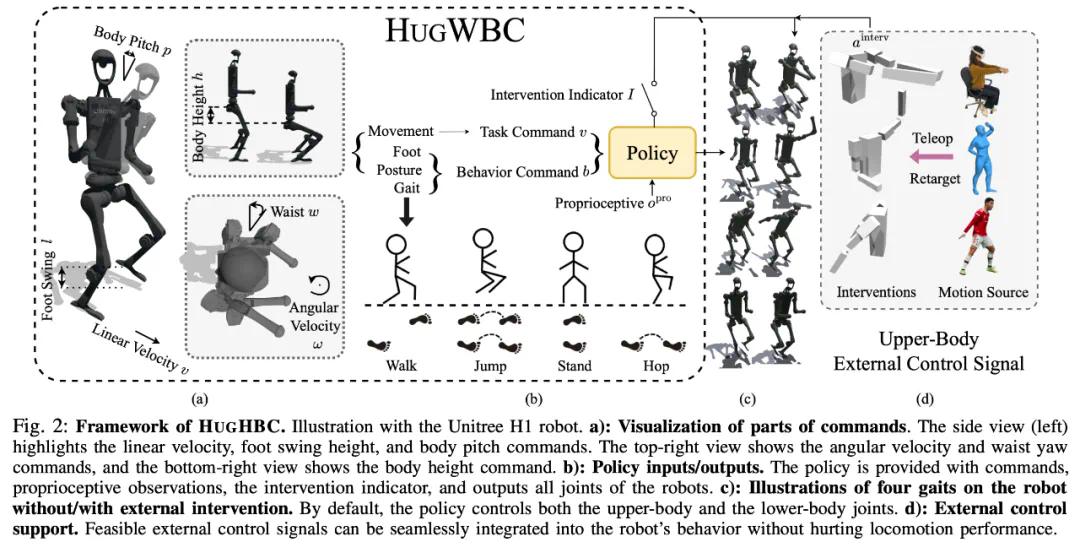
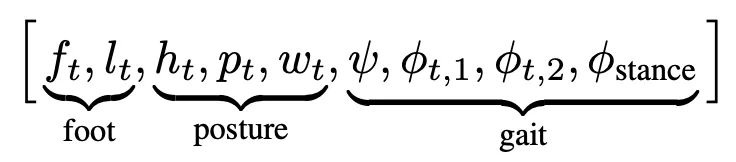
上海交通大学和上海人工智能实验室的研究团队研发了一种名为hugwbc的通用人形机器人控制器,赋予机器人多种步态(包括行走、跑步、双脚跳跃和单脚跳跃)及精细化运动控制能力。该控制器突破了以往仅依赖速度指令或关键点的限制,引入了扩展指令空间,包含任务指令(速度)和行为指令(姿态、脚步、步态),实现对机器人行为的细粒度调整。

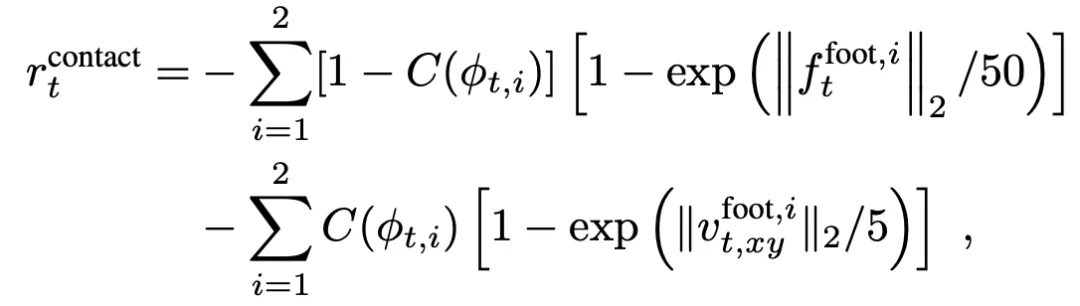
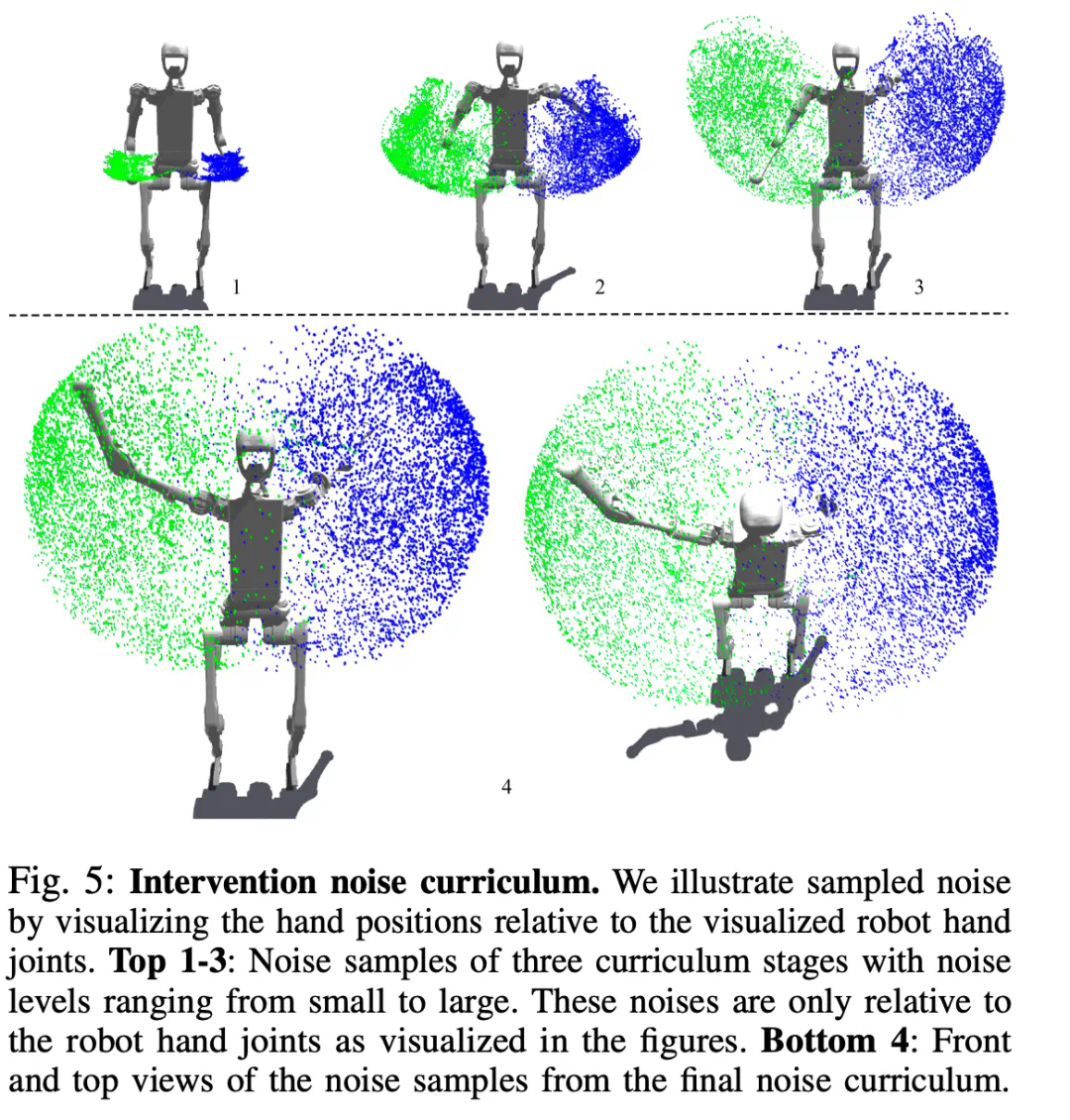
HugWBC框架整合了控制理论和强化学习,通过设计接触-摆动奖励和足端摆动奖励,引导机器人学习不同步态。此外,它还利用对称奖励机制,鼓励机器人产生自然、对称的运动,并通过上肢噪声课程训练,提升控制器在外部上肢介入情况下的鲁棒性。
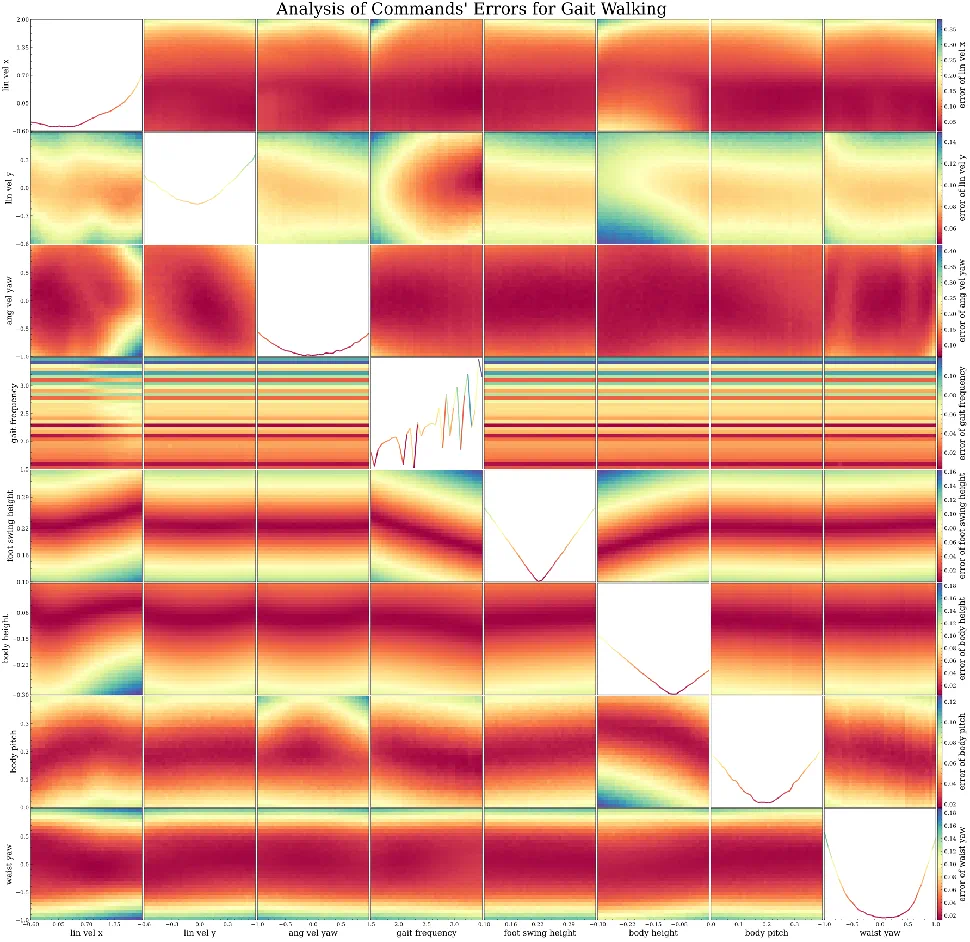
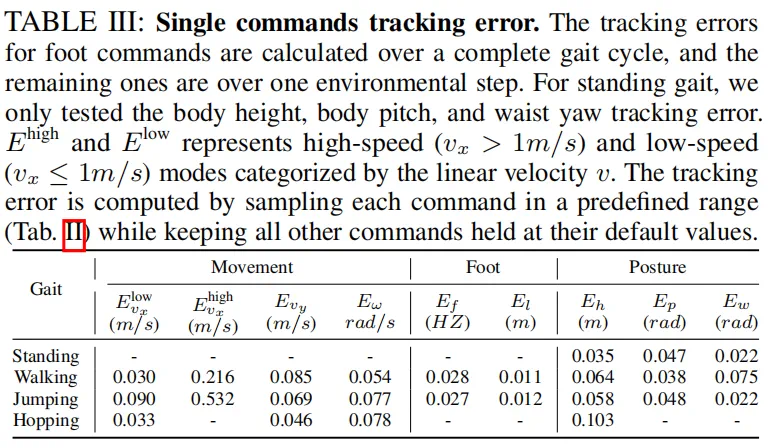
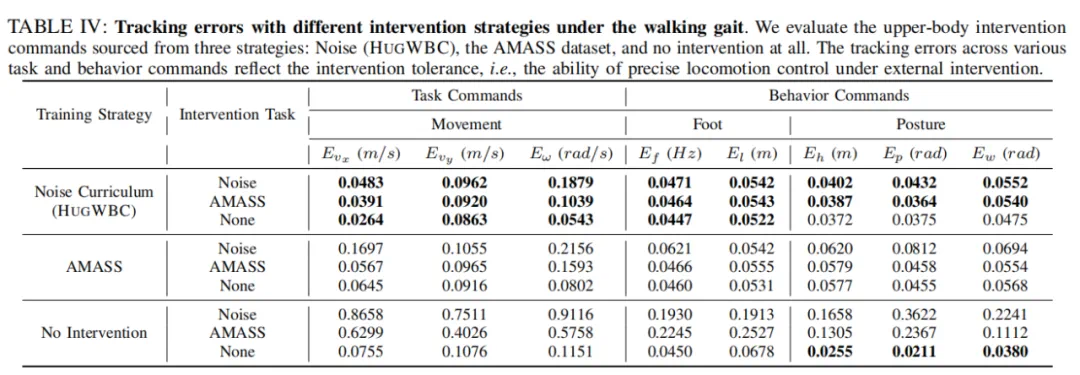
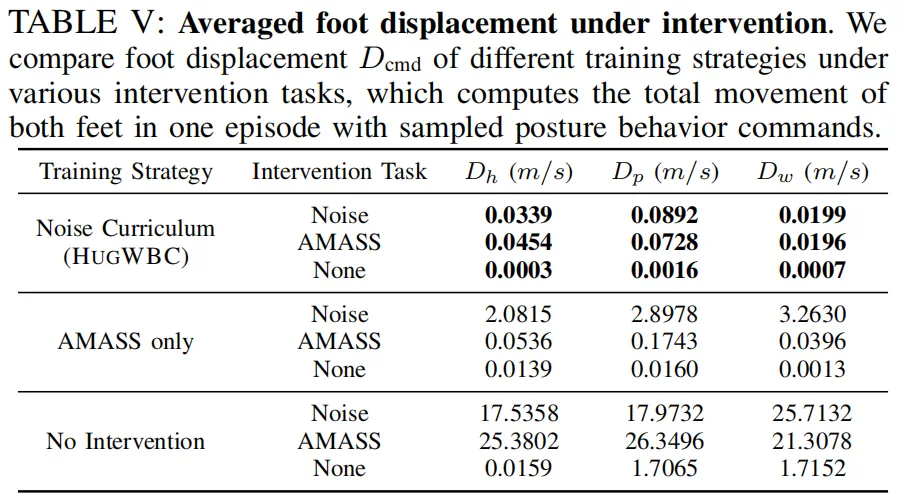
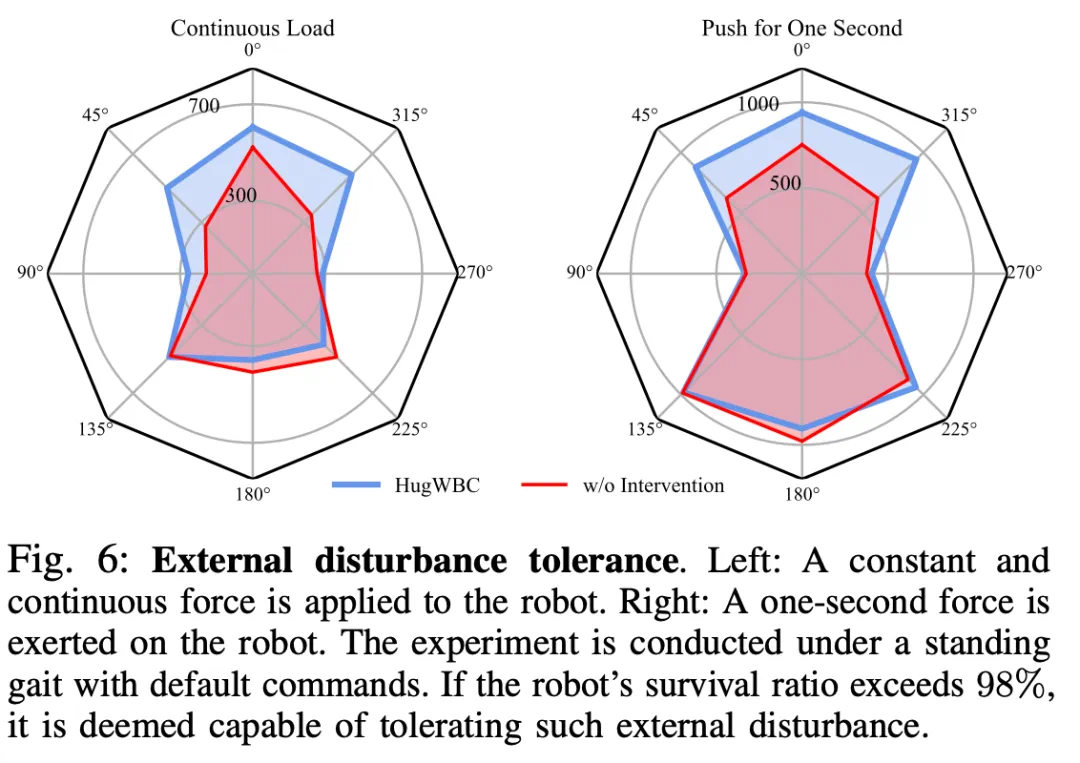
实验结果表明,HugWBC在指令跟踪精度和鲁棒性方面均优于基线方法。它在各种步态下的指令跟踪误差较低,并能有效应对上肢干扰。研究人员还通过热力图分析了不同指令组合对控制器性能的影响,揭示了指令间的相互作用关系。
总而言之,HugWBC控制器为人形机器人提供了更通用、更灵活的运动控制能力,为未来人形机器人在复杂环境下的应用奠定了坚实基础。项目主页:


以上就是从扭秧歌到单脚跳,HugWBC让人形机器人运动天赋觉醒了的详细内容,更多请关注其它相关文章!